Diagnostic préventif embarqué
Un module de diagnostic préventif peut s’envisager en tant que système mis à disposition chez le garagiste et utilisé systématiquement lors du passage d’un véhicule au garage. Mais le diagnostic préventif prend cependant toute sa portée lorsqu’il s’inscrit dans le triangle véhicule, constructeur, garage et qu’il est envisagé au travers d’un système embarqué. A bord et en temps réel, la notion de gravité d’une situation anormale prend alors une importance particulière ; il faut être en effet capable d’informer le conducteur de la nécessité se rendre rapidement au garage, voire d'actionner automatiquement un coupe-circuit pour isoler un organe non vital défaillant. La présence à bord du système de diagnostic permet aussi de détecter et d'isoler lorsqu'elles sont présentes les défaillances fugitives ou intermittentes et d'enregistrer le contexte d’apparition des défaillances.
La surveillance de paramètres continus pour faire de la détection n'est pas le sujet de ce module. Cet aspect est très largement couvert dans la littérature relative au diagnostic et est abordé dans AUTODIAG par le module de diagnostic par reconnaissances des formes.
Ce module est dédié à la surveillance du comportement des fonctions véhicules (essuyage, lavage etc..) au travers des informations accessibles en temps réel sur tout type de véhicule. L’architecture « multiplexée » actuelle des véhicules comporte un ou plusieurs réseaux CAN (voir Figure 1). L’interaction des différents calculateurs de commande embarqués utilise ce réseau. Dans notre approche, le réseau CAN est donc le point d’observation privilégié de cette interaction. |
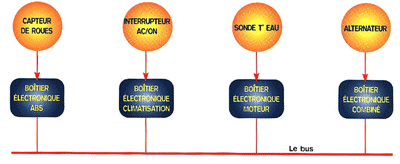
Figure 1 : Exemple d'architecture multiplexée |
Certains défauts fugitifs et intermittents sont caractérisés par l’absence ou l’insertion inopinée d’un message sur le réseau. Nous ne cherchons donc pas à détecter l’ensemble des défauts fugitifs et intermittents mais seulement ceux qui se traduisent par les symptômes énoncés ci-dessus. Cette classe de défaut englobe les faux contacts, les parasites, etc. L’émission inopinée d’un message par un calculateur (ou boîtier électronique) ou l’absence d’un message peut provoquer un dysfonctionnement du système électronique embarqué. Le comportement erratique qui en résulte souvent n’est généralement plus observable lorsque le véhicule est amené au garage par le client. Ce type de défaut ne peut être détecté que par le module de diagnostic embarqué qui peut effectuer simultanément une pré-localisation de la défaillance en désignant le calculateur mis en cause ainsi que les différents composants qui lui sont connectés. Cette pré-localisation permettra par la suite, dans le garage et hors ligne, de faire un diagnostic plus détaillé Afin de déterminer la cause du problème.
Pour surveiller les fonctions véhicules au travers des messages circulant sur le réseau CAN, il est nécessaire dans un premier temps d’établir un modèle du comportement de ces fonctions. Ce modèle peut être obtenu à partir des données de conception et représente le bon fonctionnement normal de la fonction. Le choix d’un modèle de bon fonctionnement se justifie par le fait qu’il n’est pas raisonnable de considérer de pouvoir disposer d’un ensemble exhaustif des défaillances susceptibles de se produire dans un véhicule. Néanmoins, si une telle connaissance existe, elle devra être prise en compte. Le modèle ainsi obtenu doit ensuite être « projeté » sur l’ensemble des observables c’est à dire restreint aux messages circulant sur le réseau.
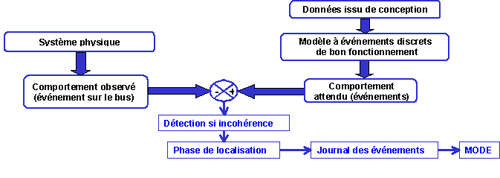
Figure 2 : Raisonnement à base de modèle |
Le principe de détection à la base de ces travaux est illustré (Figure 2): c’est le raisonnement à base de modèle classiquement utilisé dans les travaux en diagnostic.
Le principe est de comparer les événements attendus par le modèle avec les événements observés sur le réseau de communication. Toute incohérence donne lieu à la détection d’un symptôme de défaillance puis à une phase de pré-localisation de l’origine de la défaillance. L’ensemble des informations associées au contexte d’apparition de ces défaillances c’est-à-dire l’ensemble des données disponibles, l’événement en cause et le sous-système associé, seront conservés dans le « journal des événements ». |
Par ailleurs, les contraintes liées à l'environnement d'implantation ne peuvent pas être ignorées. La capacité de calcul embarquée et les contraintes temps réel découlant de la dynamique du véhicule, ne permettent certainement pas l'implantation de toutes sortes d'algorithmes. Ceux-ci devront être simples, robustes et adaptables.
Une deuxième problématique porte sur la complémentarité entre le module embarqué et le reste du système de diagnostic (Figure 3).
Le module embarqué produit une estimation de l’état du véhicule et doit être couplé à un module de décision ayant des connaissances propres lui permettant d’informer le conducteur du véhicule, d’élaborer une stratégie et de transmettre les différentes requêtes au constructeur et au garage. Ceci définit les communications à établir entre le véhicule et son environnement afin de mettre en synergie le système embarqué avec les procédures de diagnostic hors ligne existantes. C’est pourquoi il est nécessaire de déterminer les informations pertinentes que doit fournir le module embarqué au système en garage afin d’aider ce dernier à identifier le composant défaillant.
Par ailleurs des réflexions doivent être menées pour déterminer dans quelle mesure, en l'absence de symptôme issu du diagnostic embarqué, le diagnostic en garage peut néanmoins s'appuyer sur cette absence de symptômes. La problématique scientifique sous-jacente concerne sur lestechniques de distribution de modèles et/ou de connaissances.
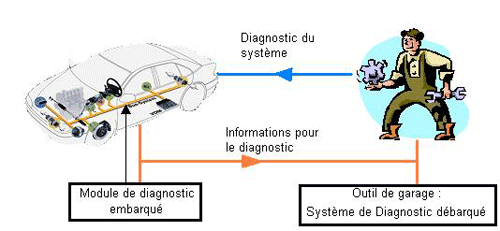
Figure 3 : Interconnexion module DDP-Système de diagnostic débarqué
Généralement, lorsque l’on parle de prévention, il s’agit dans le monde du diagnostic continu de faire du prognostic c’est-à-dire d’étudier les tendances des variables continues. Ici, la détection des défauts, dès leur première apparition, et même si cette apparition est fugitive ou intermittente peut permettre d'éviter une panne persistante, immobilisante. Ce genre de pannes peut être plus ou moins dangereux pour la sécurité du conducteur. Pour éviter ce genre de problème, une indication doit être transmise au conducteur afin que celui-ci se rende rapidement chez un garagiste pour un diagnostic plus détaillé.
CHERCHEURS CONCERNES :
- Siegfried SOLDANI, Ingénieur INPG, doctorant CIFRE Université Paul Sabatier, ACTIA et LAAS-CNRS
- Jérôme Thomas, ingénieur ACTIA
- Michel COMBACAU, LAAS-CNRS, Professeur à l’Université Paul Sabatier de Toulouse
- Audine SUBIAS, LAAS-CNRS Maître de conférence à l’Institut National des Sciences Appliquées de Toulouse
MOTS-CLES :
Diagnostic, fautes intermittentes, systèmes à événements discrets, automobile
KEYWORDS :
Diagnosis, Intermittent faults, discrete events system, automotive domain
CONTACT : Michel COMBACAU, combacau@laas.fr
|


