Master thesis 2016/2017
These proposals are given for the year 2015, typically for the period March to September.
Joints flexibilities state estimation for a humanoid robot
To control a humanoid robot, we generally consider it as a multi-body with stiff limbs and joints. However, some robots have flexibilities, for example in ankles as in the HRP-2 humanoid robot, or in joints as in the Pyrene humanoid robot. In previous works we developped a state estimator for the flexibility in HRP-2 ankles from propioceptives data and either an Inertial Measurement Unit (IMU) sensors only, or a fusion of IMU and contact forces sensors. We are now interested in generalizing the approach to a state estimator of flexibilities in all the joints of the Pyrene humanoid robot. The goal of the intership is to understand the dynamical model developped for this purpose and to implement the state estimator based on this model. The state estimator will be tested in simulation and on the real robot.
Details in a pdf file.
Master thesis 2015/2016
These proposals are given for the year 2015, typically for the period March to September.
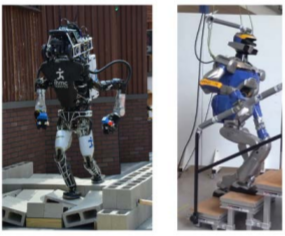
Balance for complex robots "in the blink of an eye"
Details in a pdf file.
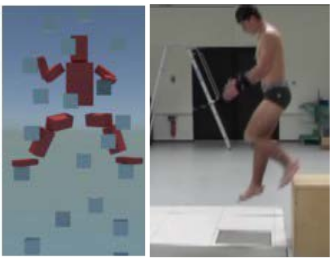
Planning contact sequences with aggressive dynamics
Details in a pdf file.
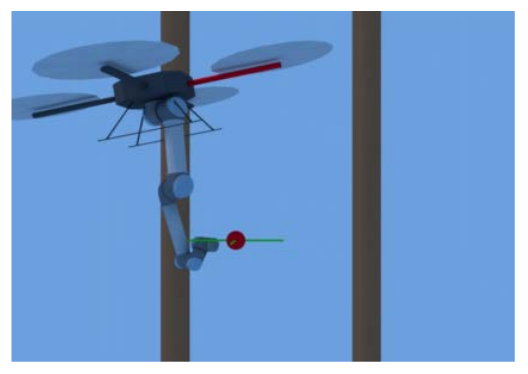
Intelligent teleoperation for complex micro drones
Details in a pdf file.
Développement d’une interface graphique pour un logiciel de planification de mouvement en animation graphique
Details in a pdf file, in french.
Master thesis 2014/2015
These proposals are given for the year 2015, typically for the period March to September.
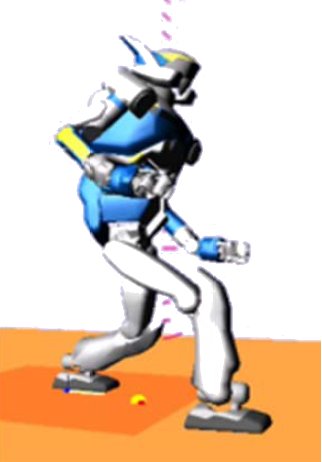
Etude de la stabilité chez l'homme et application à la robotique humanoïde (SUJET POURVU)

Details in a pdf file, in french.
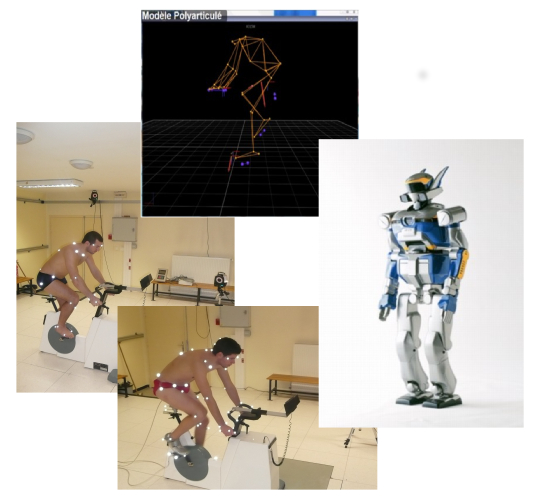
Etude de la position en danseuse chez le cycliste avec un robot humanoïde de taille humaine (SUJET POURVU)
Details in a pdf file, in french.
Collision Detection for a rod (deformable objet) (SUJET POURVU)
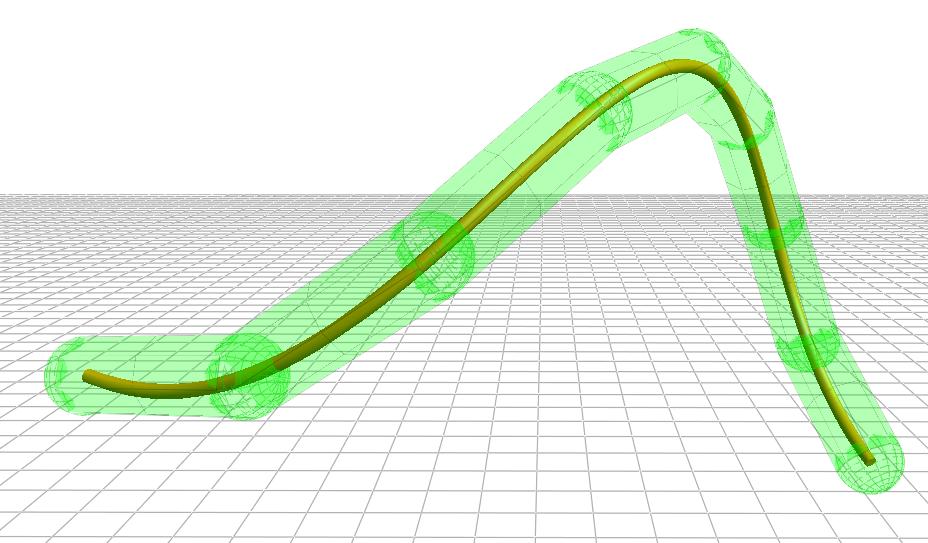
Details in a pdf file, in french.
Path Planning for a rod with contact (SUJET POURVU)
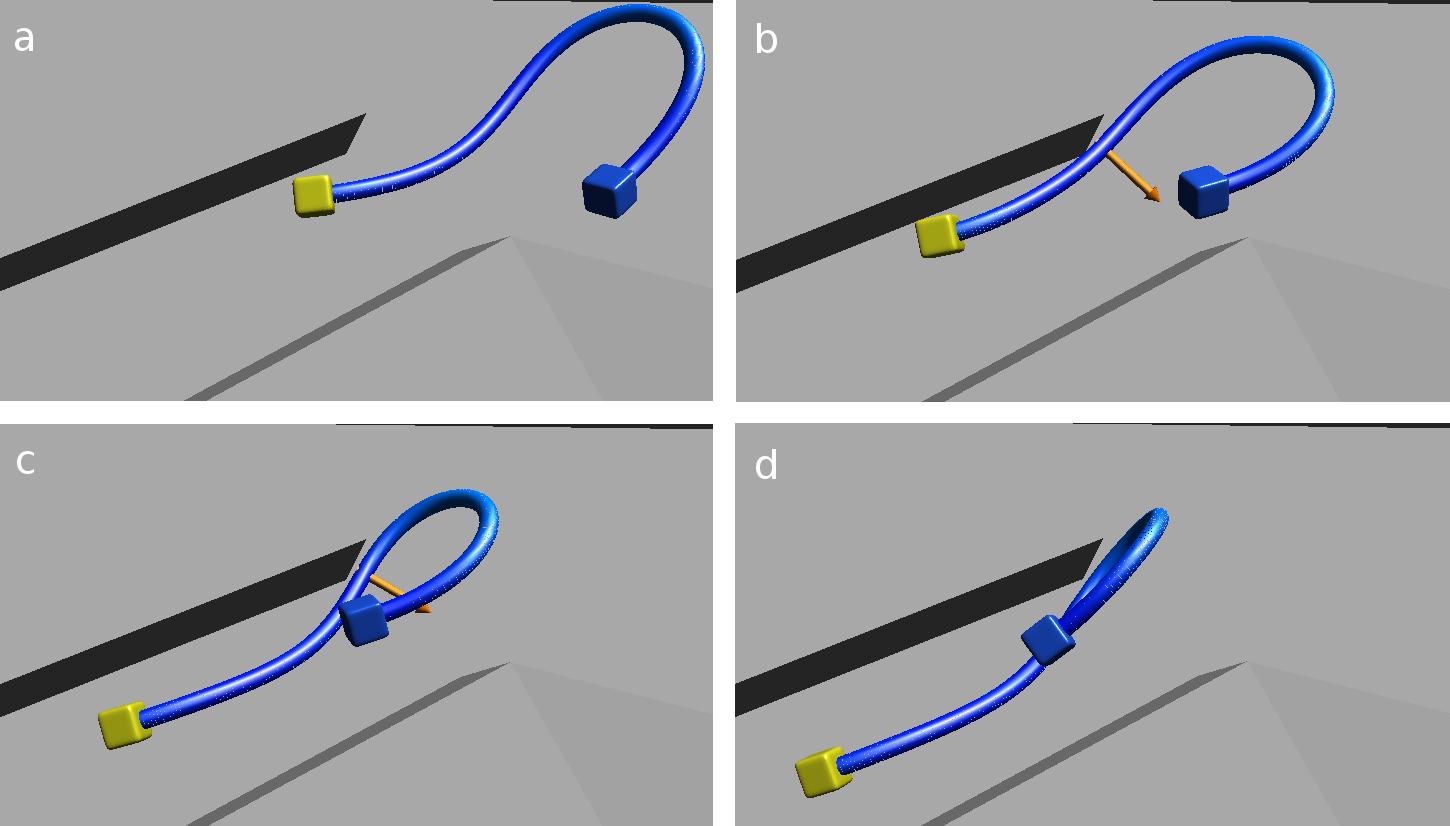
Details in a pdf file, in french.
Rod Motion with Baxter Robot (SUJET POURVU)

Details in a pdf file, in french.
Hierarchical quadratic programming

Our motion generator is based on a numerical metho called hierarchical quadratic programming, that gives us the best performances of our community. We now want to improve the behaviour and performances of the solver by deliberately degrading the algorithms using well-identified properties of the robot model. The work will formalize these properties and identify the consequences on the solver theoretical aspects. If possible, the validation will be pushed until the real application on the physical robot to realize dynamic whole-body movements.
In collaboration with JRL-Japan. Details in a pdf file.
Numeric methods for hierarchical inverses
Our motion generation methods are mainly based on quadratic programs, organized in cascade to enforce a hierarchy in case of incompatibles goals. The work will study the mathematical properties of these quadratic program. The first goal is to find a solution to automatically regularize the problems when the conditioning number is too low, without decreasing the performances in the directions that are properly conditioned. The methodology will then be applied to control the dynamic of the robot, taking advantage of the specific shape of the system to reduce the computation costs and improve the numerical stability.
Details in a pdf file, in french.
Automatic generation of optimal polynomials code

Dynamic-based control law should run at 1kHz to obtain a control of good quality. In order to obtain such performances, the time spent to compute the model of the robot (mass matrices, Jacobians, etc) is a big issue. A known solution to improve the computation time is to take advantage of the mechanical structure of the robot to obtain simplification. However, this solution requires a very good knowledge of the dynamic since it is based of the intuitions the engineer can have, and it is very dependent on the changes from one robotics structure to the other. We propose to try to obtain a comparable simplification automatically, by studying the model structure at the mathematical level. In particular, the work will focus on a polynomial writing of the equations, and try to use automatic-code-generation tools to obtain optimal performances.
Details in a pdf file, in french.
Dynamics sensor-based robot control
Gepetto has recently proposed a generic solution to generate whole body motion based on the robot dynamic. These motions are then replayed on the robot in open loop. The objectives of this work will be to develop the methodology to apply the same motion generation tool, but in real time, onboard the robot, and to account for the sensor feedback to modify the robot behavior when necessary. In a first time, the work will focus on the use of the force sensors to detect and positioned the contact points.
Details in a pdf file, in french.
Toward human-plausible motion generation
The motion generator of the team is based on the robot dynamic. However, it could be similarly based on the dynamic of the human-body model. In that case, it could be applied to generate motions that would be similar to the motions that a real human would have produce in a similar situation. Applications can be for example to study the ergonomic of a virtual prototype, by automatically generate human-plausible motions, and check that there is no torques overshoot or painful position. The goal of this work is to account for the specificity of the human-body model, typically joints (hip, shoulder) whose models are more complex than what is typically encountered on a robot. The generated motion will then be compared to real human motions obtained from the motion capture tool of the lab.
Details in a pdf file, in french.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}