WP descrition: The interaction and the coordination between the partners is favored by the organization
of yearly plenary meetings that bring together the project members. Each meeting typically lasts 1 or 2 days. One part
of the meeting consists of talks given by project members or external guests presenting their most
recent developments in relevant areas for the project. Significant slots are devoted to presentations
given by the students, with the double objective of developing their presentation skills and of obtaining
valuable feedback on their work. The rest of the meeting consists of working sessions, where the
project members spread in groups working on a specific problem related to the project. The
closing session of the meeting summarizes the ideas exchanged in the working groups;
it also defines the research agenda of the project for the following year.
Coordinator: Luca Zaccarian (LAAS)
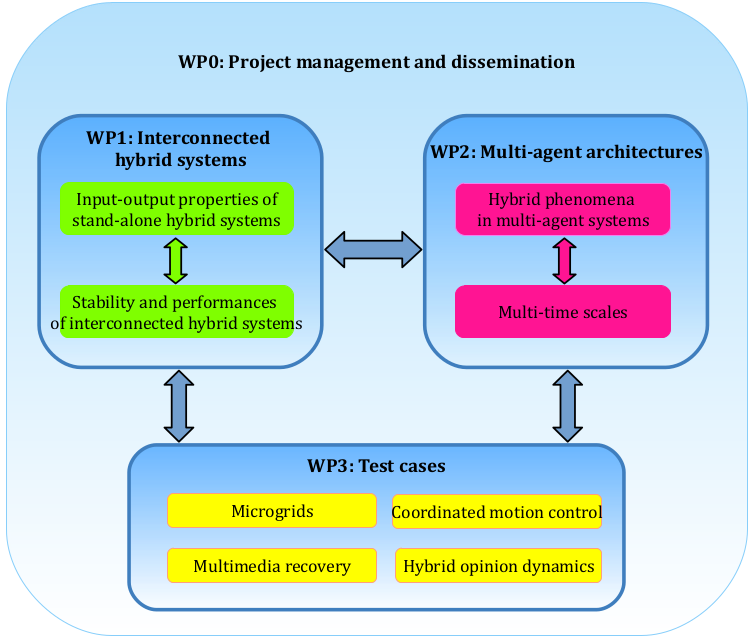
The HANDY project consists in four WorkPackages organized according to the following diagram.
WP descrition: The area of hybrid dynamical systems will be enriched with
the interconnection tools typical of networked systems, first focusing on input/output characterizations of single units and then moving on to complete interconnections.
Coordinators: Romain Postoyan (CRAN) and Luca Zaccarian (LAAS)
Participants:
