
Preface
For an agent to act intelligently, three essential cognitive functions are acting, planning, and learning. This book is about ways to automate and integrate them. It is a successor to our previous books Automated Planning:Theory and Practice and Automated Planning and Acting. It includes research advances that have occurred since those books were published.
This book covers several types of models, approaches, and algorithms---deterministic, probabilistic, hierarchical, nondeterministic, temporal, and spatial---and discusses how to use them for acting, planning and learning. The published literature on these topics is huge and covers several disconnected areas, not all of which can be covered in a single book. Thus our choice of material was motivated by putting the integration of acting, planning and learning at the forefront.
The book comprises 24 chapters. After Chapter 1, the Introduction, the other chapters are organized into eight parts. The first seven focus on the following representational models, with each part containing chapters on acting, planning, and learning with the given model:
- Part I uses a ``classical'' deterministic state-transition model, represented using state variables. Several of the concepts in this chapter are used throughout the book.
- Part II adds hierarchical task networks (HTNs) to the state-transition model in Part I.
- Part III and Part IV extend the state-transition model to include, respectively, probabilities and nondeterminism.
- Part V describes a hierarchical refinement approach that builds on the HTN concepts in Part II and the probabilistic model in Part III.
- Part VI models time and concurrency using a chronicle representation.
- Part VII introduces models of robotic motion and manipulation and their combination with more abstract tasks.
Using This Book
This book is intended both as an information source for scientists and professionals and as a graduate-level textbook. In most of the chapters, the references are postponed to a discussion section at the end of the chapter. Most of the discussion sections are followed by sets of exercises. We will make lecture slides and other auxiliary materials available online.In the pseudocode for our algorithms, all variables are local unless declared global. We assume readers are familiar with the basic concepts of algorithms and data structures at the level of an undergraduate-level computer science curriculum. Two appendices provide information about some mathematical and technical topics that go beyond this background.
In addition to providing a coherent synthesis of the state of the art, this book contains a substantial amount of new material, most of which is presented in comprehensive detail consistent with textbook use. Some sections contain new material that has not yet been implemented and empirically assessed, to provide an invitation for further research.
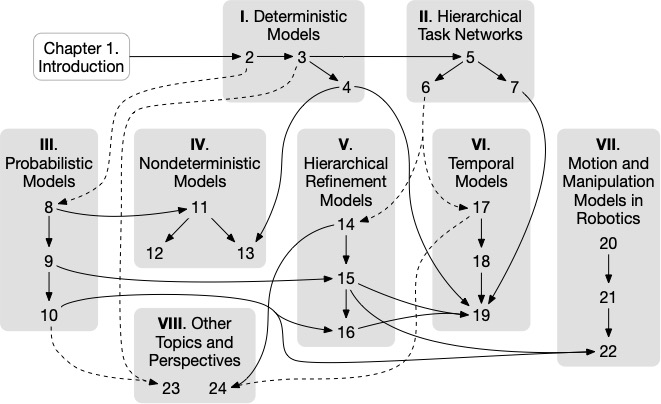
The study of this book may follow several paths, depending on the reader's needs and familiarity with the material. The following figure shows which chapters depend on which others. We hope this will help readers and teachers plan a fruitful journey through the book.
Acknowledgments
We are grateful to Sylvie Thiébaux at the Australian National University and LAAS-CNRS, and Marcel Steinmetz at LAAS-CNRS, for contributing to Section 9.3 and writing Section 9.4; and to Michela Milano at the University of Bologna, for writing the Foreword.We thank several friends and colleagues for their valuable feedback on parts of this book. These include Pascal Bercher, Janette Cardoso, Bernardo Magnini, Fabio Pianesi, Mark ``Mak'' Roberts, Luciano Serafini, Sylvie Thiébaux, and Silvano Dal Zilio. Dana Nau thanks the students who took a course from a rough draft of this book. Paolo Traverso gives special thanks to Luciano Serafini for his contributions to the chapter on learning deterministic domains.
We acknowledge the support of our respective organizations, which provided the support and facilities that helped to make this work possible: LAAS-CNRS and the University of Toulouse, France, the University of Maryland, and FBK in Trento, Italy. Dana Nau thanks ONR, NRL, AFRL, and AFOSR for their support of his work. Malik Ghallab and Paolo Traverso acknowledge support from the AIPlan4EU project (Grant agreement ID: 101016442), and Paolo Traverso acknowledges support from the FAIR - Future AI Research project (PE00000013) under the NRRP MUR program funded by the NextGenerationEU.