Planning
Software release planning
At first, in 2005, a planning was established. It announced new versions every year. A first version with only analysis tools; A second version with state-feedback and full-order output feedback design results; A third version with static output feedback features. But the planning was not respected. Still the toolbox has been improved and new features added frequently. Many features are coded only in beta versions and need polishing to be included in the toolbox. Next releases will depend on time for doing this polishing, on enthusiasm for new theoretical results and user reactions. Do not hesitate to react.

Version 1
robust performance analysis
- started in june 2005 -
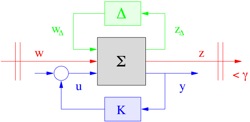
This package includes uncertain
The analysis tools are Lyapunov based. They go beyond the quadratic stability framework and include several PDLF-based (parameter-dependent Lyapunov function) methods. Robustness is analyzed with respect to stability (for continuous or discrete-time systems) as well as to pole location, H infinity, H2 and impulse-to-peak performances.
The numerical framework is semi-definite programming (SDP). Thanks to the YALMIP parser all available SDP solvers can be used.
Version 2
robust multi-objective state-feedback design
- started in february 2007 -
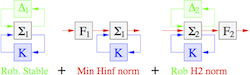
This version includes all features of version 1 plus LMI-based control design features. In the current release control design is limited to state-feedback. It includes multi-objective design features. It is expected to include full-order dynamic control design results (not yet coded).
R-RoMulOC Version
Extension of version 2 with added randomized tools
- started in december 2013 -
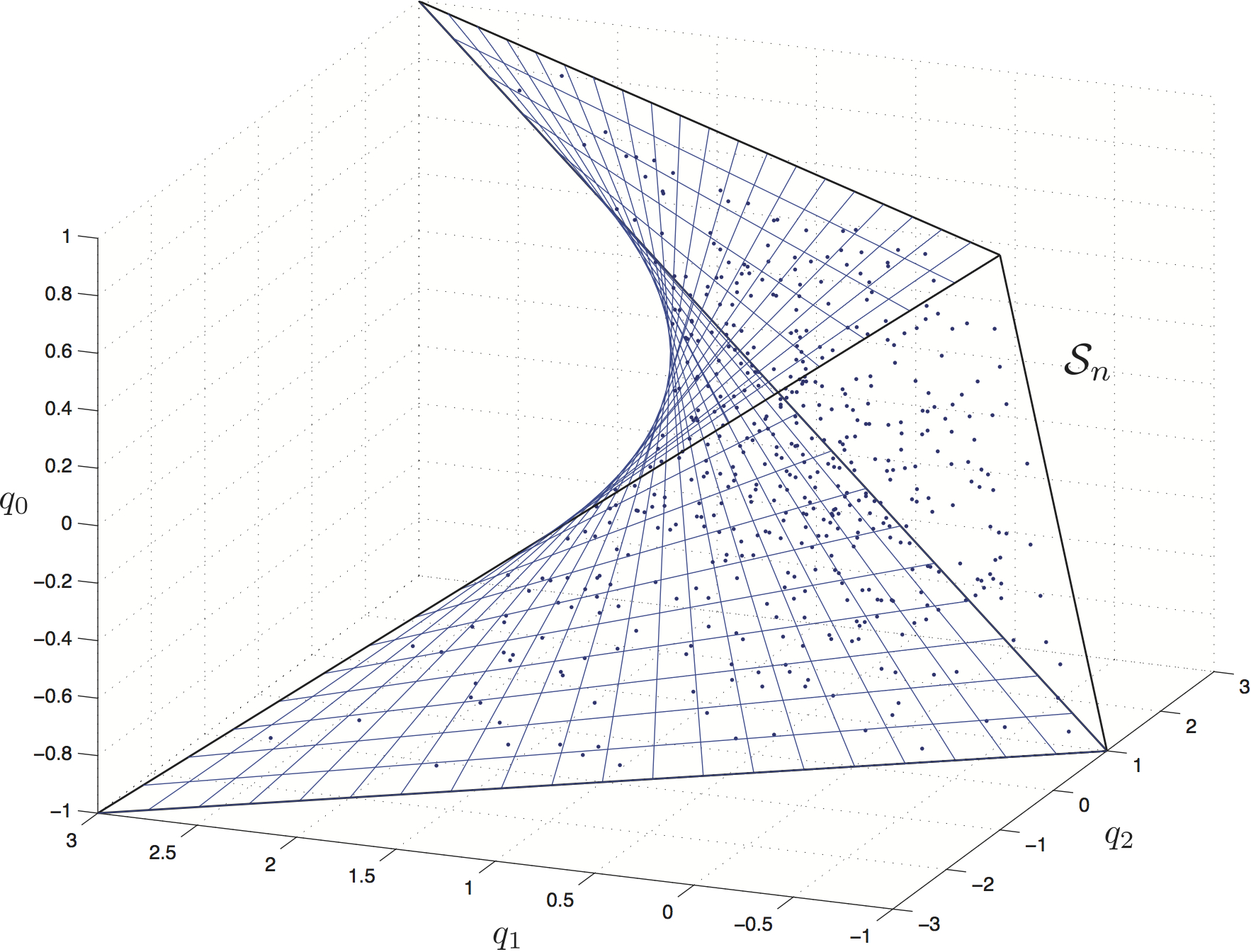
This version is a major upgrade of RoMulOC, which changes its name to R-RoMulOC at this occasion. It includes randomized techniques of the RACT toolbox. It has been first presented at a 2013 IEEE-CDC workshop and is the result of the CORARC project. Randomization is used both for Monte-Carlo type analysis of systems with uncertainties and for probabilistic resolution of robust LMI problems.
Version 3
robust and resilient static output feedback design
- beta code currently tested -
This version will includes static output feedback control design features. The problem is not LMI-representable, thus only local heuristics are expected. Resilient control design features will be included.

ROMUALD Version
robust performance analysis of descriptor systems
- beta code currently tested -
A new version of RoMulOC is currently developped. It extends all previously coded analysis results to
projects.laas.fr/OLOCEP/rromuloc - last update 21-Dec-2013